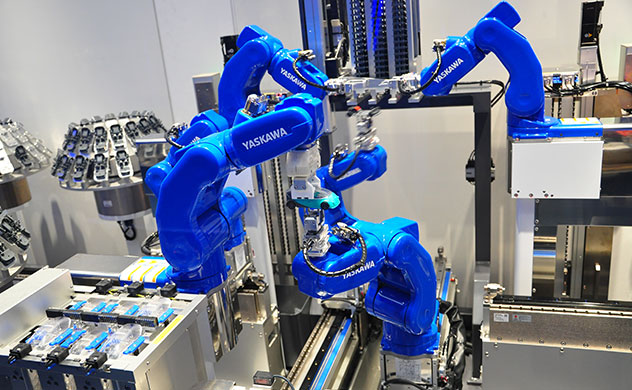




















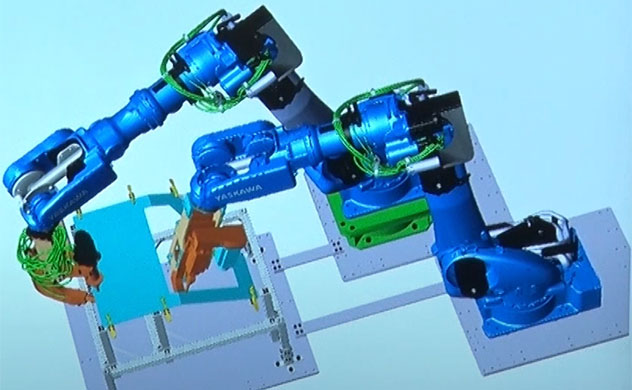
Our unique planning technology virtually simulates the optimal path of multiple robots. For example, when a spot welding robot for an automobile body suddenly stops during operation in a process where 8 to 10 robots are placed close to each other, it may then be necessary to return the robot to a zero position. Regarding which robot arm can be moved first to return to the origin without bumping into other arms, it takes many hours even for a skilled worker to operate it with a programming pendant. However, by automatically generating the optimal path with the planning function, the simulation can be completed in a few minutes, greatly reducing engineering time for recovery.
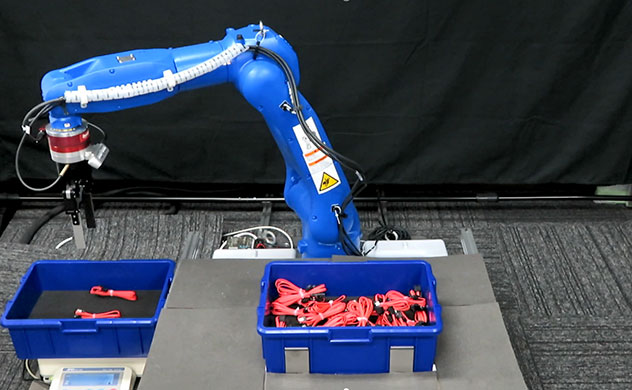
This technology can also be applied to automatic path generation when field conditions are uncertain, such as picking of randomly placed objects.
Other solutions
-
Production


-
Quality


-
Maintenance